Physical AI 在服務型機器人
Physical AI 在服務型機器人領域,是指將人工智慧的能力深度融入到能夠與實體世界互動、執行服務任務的機器人系統中。這類機器人能夠感知環境、理解人類意圖、自主決策並以實體方式提供協助,從而改善我們的生活品質、提升工作效率,並在各行各業中創造全新的服務模式。它們不再是簡單的自動化工具,而是具備一定「智慧」和「情商」的協作者與幫手。

Physical AI 賦能服務型機器人,使其更智能、更具人性化。
Physical AI 在服務型機器人的應用與無限可能
服務型機器人與 Physical AI 的結合,正在開創以下幾個關鍵領域的無限可能:
1. 智慧導覽與接待
- 自主導航與環境感知: 搭載 AI 驅動的 SLAM (即時定位與地圖構建) 技術,服務機器人能在複雜、動態的環境中自主導航,避開障礙物和人群,無需預設軌道 (來源 6.1, 6.7)。
- 多模態人機互動: 透過自然語言處理 (NLP) 理解語音指令和提問,結合表情識別與肢體語言分析,使其能進行更自然、流暢的對話,並根據人類情緒調整回應,提供個人化服務 (來源 8.1, 8.2, 8.3, 8.5, 8.8, 8.9)。
- 資訊提供與個性化推薦: 在商場、博物館、酒店等場景,機器人能主動提供導覽、解答問題、甚至根據使用者偏好推薦商品或服務。
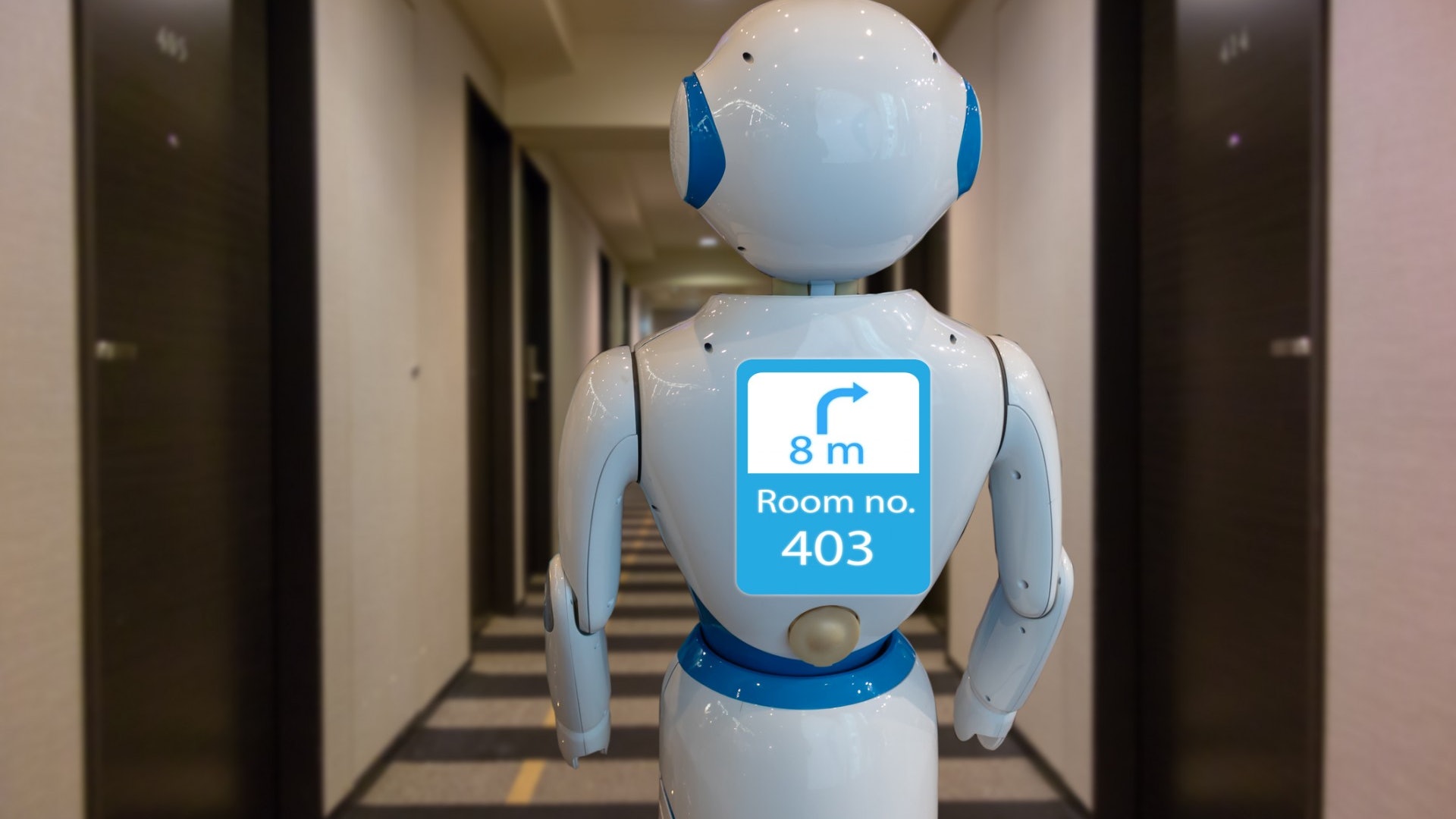
智慧機器人為顧客帶來高效便捷的服務體驗。
2. 居家照護與個人助理
- 老年與殘障輔助: AI 驅動的輔助機器人可協助老年人或行動不便者取物、開門、提醒服藥,甚至在緊急情況下呼叫救援。具備 AI 的智慧義肢和外骨骼能提供更自然的運動輔助。
- 家庭陪伴與娛樂: 陪伴型機器人能與兒童或獨居老人互動、玩遊戲、播放音樂,提供情感支持。AI 使其能學習家庭成員的習慣和偏好,提供更貼心的服務。
- 智慧家居集成: 與智慧家居系統深度整合,實現語音控制、環境監測、安全預警等功能,打造更智能、舒適的居住環境。
3. 物流配送與清潔服務
- 自動化配送: 在醫院、辦公大樓、社區內,配送機器人能自主規劃路線、搭乘電梯、穿越複雜空間,將餐飲、包裹、醫療物資等安全準確地送達目的地。
- 智慧清潔與維護: 清潔機器人配備 AI 視覺和環境感知能力,能識別髒污、規劃高效清潔路徑,並適應不同地形和障礙物,提升清潔效率和品質。例如在大型商場或倉庫中。
- 設施檢查與維護: 檢查型機器人能自主巡邏,利用 AI 視覺和各種感測器檢查設備運行狀態、發現異常,並實時報告,減少人工巡檢的頻率和風險。
4. 醫療康復與特殊場景服務
- 智慧康復助理: 康復機器人能根據患者的康復進度,通過 AI 調整訓練難度,提供精準的實體康復輔助,並監測患者的動作表現 (來源 6.2)。
- 遠程臨場與協作: 遠程臨場機器人 (Telepresence Robots) 結合 AI,使遠方的專業人士(醫生、教師、技術人員)能透過機器人進行實時互動、診斷或指導,打破地理限制。
- 災難救援與危險作業: 在危險或人類難以進入的環境中,服務型機器人可執行偵查、物資運送、排爆等任務,AI 賦予其自主導航和決策能力,降低人類風險。
循序漸進的課程安排
要深入掌握 Physical AI 在服務型機器人領域的應用,需要結合機械、電子、電腦科學、人工智慧、人機互動以及倫理等多方面的知識。以下是一個循序漸進的課程安排:
從機器人學基礎到人機互動與倫理,全面培養服務型機器人專家。
階段一:基礎核心與機器人原理
- 1.1 機器人學概論: 機器人歷史、分類、應用、基本構成 (機械臂、移動平台)、服務型機器人特點。
- 1.2 程式設計基礎: 資料結構、演算法、物件導向程式設計。Python 於 AI 與高層應用,C++ 於即時控制與嵌入式系統。
- 1.3 數學與物理基礎: 線性代數、微積分、機率論、基礎物理學、機器人運動學所需數學。
- 1.4 電子電路與感測器基礎: 類比/數位電路、微控制器 (Microcontroller) 基礎、常用感測器 (IMU, 距離、光學、力) 工作原理。
階段二:人工智慧與感知技術
- 2.1 機器學習與深度學習:
- 機器學習: 監督式學習(分類、迴歸)、非監督式學習(聚類)、強化學習入門 (應用於機器人決策與控制)。
- 深度學習: 卷積神經網路 (CNN) 於物件識別、場景理解;循環神經網路 (RNN) 於語音識別。
- 2.2 電腦視覺與影像處理: 影像擷取、預處理、特徵提取、物件偵測與識別、人臉識別、3D 視覺與點雲處理 (應用於環境感知、人臉識別)。
- 2.3 自然語言處理 (NLP): 語音識別、語義理解、文本生成、對話系統設計 (應用於人機語音互動)。
- 2.4 SLAM (即時定位與地圖構建): 感測器融合(雷射雷達、攝影機)、路徑規劃、自主導航演算法 (應用於移動機器人)。
階段三:機器人軟體與人機互動
- 3.1 機器人作業系統 (ROS): ROS 架構、常用工具、建立機器人模型、感測器驅動、導航堆疊 (Navigation Stack) (來源 6.7)。
- 3.2 機器人控制與運動規劃: 正逆運動學、動力學、PID 控制、機器人手臂運動規劃、力/位置控制。
- 3.3 人機互動 (HRI): 介面設計、語音/手勢/觸覺互動、情感識別、信任度建立、協作機器人安全 (來源 8.1, 8.2, 8.3, 8.5, 8.8, 8.9)。
- 3.4 機器人軟體架構: 行為控制、感知-行動循環、多機器人協調。
- 3.5 嵌入式系統與物聯網: 樹莓派/Arduino 等開發板應用、感測器網路、無線通訊協議 (Wi-Fi, Bluetooth)。
階段四:實踐應用與倫理考量
- 4.1 服務型機器人案例分析: 分析酒店、醫療、零售、家庭等領域的成功案例。
- 4.2 智慧服務決策系統: 結合強化學習與知識圖譜,讓機器人做出更智能的服務決策。
- 4.3 機器人設計與原型開發: 從概念到實體,包含機械結構、電子系統、軟體整合的完整專案實作。
- 4.4 服務型機器人倫理與社會影響: 隱私保護、數據安全、就業影響、機器人責任歸屬。
- 4.5 實地部署與測試: 在真實或模擬環境中部署服務型機器人,進行性能測試與調優。
- 4.6 專案實作: 選擇一個服務型機器人應用場景 (如導覽機器人、配送機器人),完成從硬體搭建到軟體開發的完整專案。
透過跨領域的學習與實踐,培養新一代服務型機器人專家。