Physical AI 在自動駕駛與智慧交通
Physical AI 在自動駕駛與智慧交通領域,是將人工智慧技術與實際實體世界中的交通系統深度融合,實現從感知、理解、決策到執行的全鏈條智慧化。這不僅限於單一車輛的自動化,更涵蓋了整個交通網絡的優化與協同,預示著更安全、高效、環保的交通新時代。

自動駕駛車輛是 Physical AI 在交通領域最直觀的體現。
Physical AI 在自動駕駛與智慧交通的應用與無限可能
Physical AI 的影響深遠,其「無限可能」體現在以下幾個核心層面:
1. 高度自主的感知與決策
- 多模態感測器融合: 透過雷達、光達、攝影機、超音波等感測器數據的 AI 融合,實現全天候、高精度的環境感知,即使在惡劣天氣或複雜光照條件下也能精準識別障礙物、車輛、行人、交通標誌和車道線 (來源 1.1, 1.2, 1.5)。
- 情境理解與預測: AI 演算法不僅識別物體,更能理解它們的意圖和行為模式(例如預測行人下一步的移動方向、其他車輛的變道意圖),為自動駕駛車輛提供毫秒級的決策依據 (來源 1.1, 1.2, 1.5)。
- 即時路徑規劃與控制: 基於實時感知和高精地圖,AI 能動態規劃最佳行駛路徑,包括避障、跟車、變道、轉彎和停車,並精確控制車輛的加速、制動和轉向,實現流暢安全的駕駛 (來源 1.1, 1.2, 1.4)。
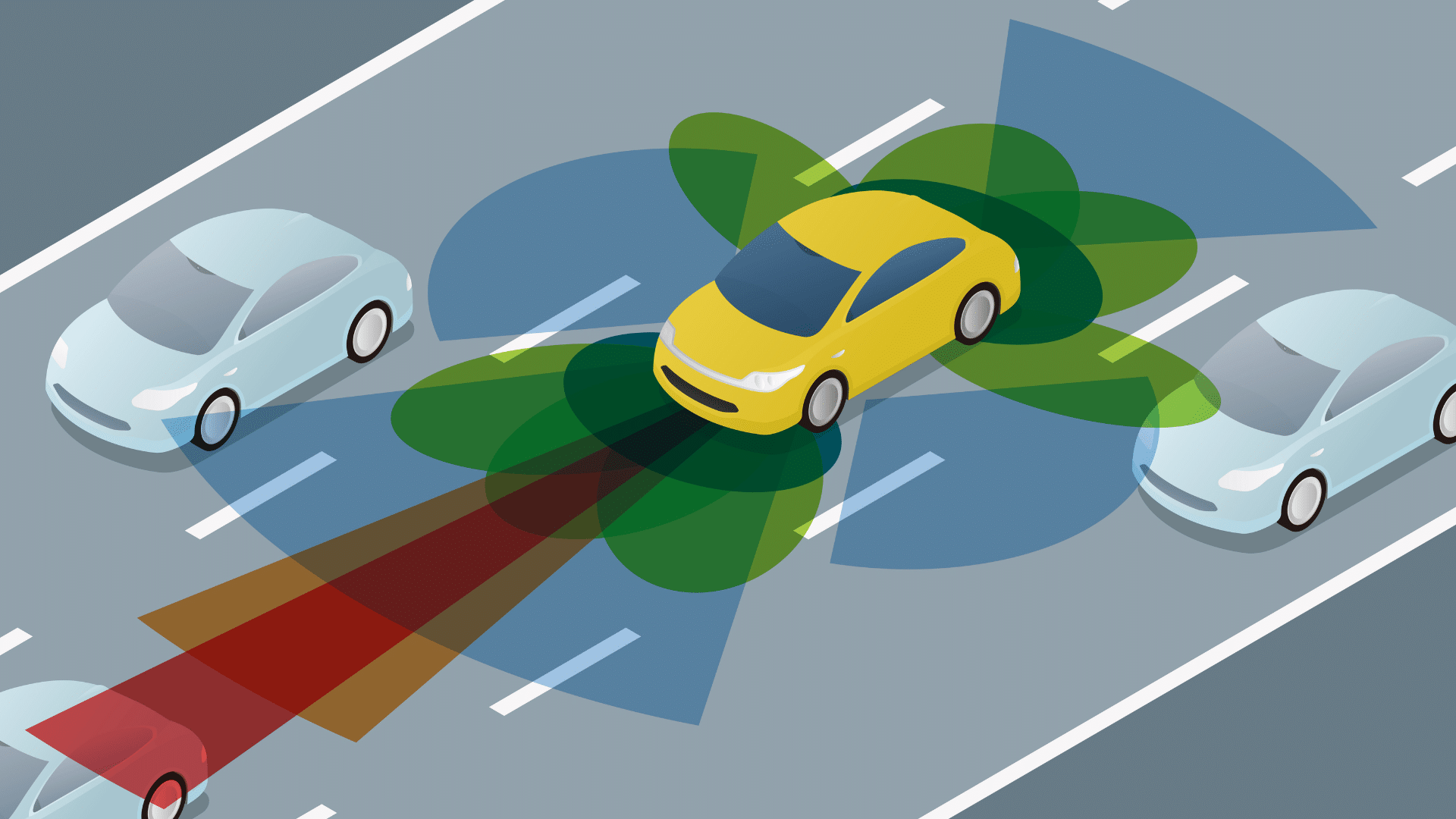
感測器融合與AI感知是自動駕駛的核心。
2. 車聯網 (V2X) 與協同交通管理
- V2V (車對車) 與 V2I (車對基礎設施) 通訊: AI 驅動的車輛可以透過 V2X 技術與其他車輛、交通號誌、路燈、道路感測器等基礎設施實時交換資訊,實現交通流量的協同優化、避免碰撞、優先通過緊急車輛等 (來源 1.3, 1.6, 2.1, 2.2)。
- 動態交通流管理: 智慧交通號誌系統能利用 AI 分析實時交通數據(如車流量、車速、排隊長度),動態調整紅綠燈時長,有效緩解交通擁堵,提高道路利用率 (來源 1.3, 1.6, 2.1, 2.2)。
- 智慧停車系統: 整合 AI 視覺識別和感測器,引導駕駛員快速找到停車位,甚至實現自動代客泊車,提升城市停車效率 (來源 1.6)。
3. 交通安全與風險管理
- 異常行為檢測與預警: AI 監控系統能分析道路使用者行為模式,識別酒駕、疲勞駕駛、超速等異常情況,並向相關部門或駕駛員發出預警 (來源 1.4, 1.7)。
- 交通事故預防與應急: 透過對歷史交通事故數據的學習,AI 可以識別高風險路段和時間點,並提出改善建議。在事故發生時,智慧交通系統能迅速識別事故地點,調度救援資源,最大程度降低損失 (來源 1.7)。
- 資產與基礎設施監測: AI 結合攝影機和無人機,可以自動檢測道路、橋樑、隧道等交通基礎設施的損壞情況,實現預防性維護,確保交通安全和基礎設施壽命 (來源 1.6)。
4. 綠色交通與永續發展
- 能源效率最佳化: 透過智慧路徑規劃、交通流管理和車隊管理,AI 可以減少車輛怠速時間、降低不必要的加速和制動,從而減少燃油消耗和碳排放 (來源 1.3, 1.6, 2.1)。
- 多模式交通整合: Physical AI 有助於整合公共交通、共享出行、自動駕駛計程車等不同交通模式,提供無縫的出行體驗,鼓勵更多人放棄私家車,減少城市交通壓力 (來源 1.6)。
循序漸進的課程安排
要深入掌握自動駕駛與智慧交通領域的 Physical AI 知識,需要融合軟體 (AI、數據)、硬體 (感測器、計算單元) 和系統整合的專業技能。以下是一個循序漸進的課程安排:
從基礎到實戰,打造自動駕駛與智慧交通的專業能力。
階段一:基礎核心與程式設計
- 1.1 交通工程與智慧交通系統概論: 交通流理論、ITS 系統架構、交通數據來源與類型、交通政策與法規。
- 1.2 程式設計基礎: 數據結構、演算法、物件導向程式設計、軟體工程基礎。Python 於數據處理與 AI 開發,C++ 於高效能感測器處理與嵌入式系統。
- 1.3 線性代數與微積分: 向量、矩陣運算、導數、積分、最佳化理論,AI 演算法的數學基礎。
- 1.4 機率論與統計學: 隨機變數、機率分佈、假設檢定、迴歸分析,用於數據分析和模型評估。
階段二:人工智慧與感知技術
- 2.1 機器學習與深度學習:
- 機器學習: 監督式學習(SVM, 決策樹, 隨機森林)、非監督式學習(聚類)、模型評估與調優。
- 深度學習: 類神經網路、卷積神經網路 (CNN) 於圖像識別、語義分割、物件偵測 (YOLO, Faster R-CNN)。
- 時間序列分析: RNN, LSTM, Transformer 於交通流預測。
- 2.2 電腦視覺與影像處理: 影像濾波、特徵提取、多視角幾何、攝影機標定、感測器融合原理。
- 2.3 感測器技術與原理: 雷達、光達 (LiDAR)、攝影機、超音波感測器的工作原理與數據特性。
- 2.4 感測器數據融合: 卡爾曼濾波 (Kalman Filter)、擴展卡爾曼濾波 (EKF)、粒子濾波 (Particle Filter) 等多感測器數據融合演算法。
階段三:自動駕駛決策與控制
- 3.1 自動駕駛系統架構: 感知、定位、決策、控制模組。
- 3.2 定位與地圖建構: 全球定位系統 (GPS)、慣性測量單元 (IMU)、同步定位與地圖構建 (SLAM) 演算法、高精地圖。
- 3.3 規劃與決策: 行為決策(有限狀態機、行為樹)、路徑規劃(A*、RRT、最佳化規劃)、運動預測。
- 3.4 機器人控制與動力學: 車輛模型、PID 控制、模型預測控制 (MPC) 等控制演算法。
- 3.5 機器人作業系統 (ROS): ROS 環境搭建、常用工具與函式庫、訊息傳輸、節點通信。
階段四:智慧交通系統與實踐
- 4.1 車聯網 (V2X) 技術: V2V, V2I, V2P, V2N 通訊協議與應用場景。
- 4.2 智慧交通控制與管理: 交通信號燈優化、交通流預測與調度、應急響應系統。
- 4.3 模擬與測試: 交通模擬軟體(如 SUMO, Vissim)、自動駕駛模擬器(如 Carla, AirSim)、虛擬現實/增強現實應用。
- 4.4 強化學習在自動駕駛: 強化學習基礎、在自動駕駛決策與控制中的應用案例。
- 4.5 專案實踐與案例分析: 開發一個小型自動駕駛模擬器、實現一個智慧交通信號燈控制系統、分析真實世界的自動駕駛或智慧交通案例。
- 4.6 倫理、法規與社會影響: 自動駕駛的法律責任、數據隱私、社會接受度等。
掌握核心技術,迎接智慧交通的挑戰與機遇。